Basic tutorial
In this tutorial, we will learn how to use the segment_lidar module for automatic unsupervised instance segmentation of LiDAR data.
Prerequisites
Before getting started, make sure you have the following:
Python installed on your system.
The segment_lidar module installed. You can install it using pip:
pip install segment-lidar
For more information on how to install the module, please refer to the Installation page.
Sample data
For testing purposes, you can download a sample data here: pointcloud.las. This data was retrieved from AHN-4. For more data, please visit AHN-Viewer.
Model checkpoints
Click the links below to download the checkpoint for the corresponding Segment-Anything model (SAM) type.
default or vit_h: ViT-H SAM model.
vit_l: ViT-L SAM model.
vit_b: ViT-B SAM model.
Basic usage
Import the necessary modules:
from segment_lidar import samlidar, view
Define the viewpoint using the view module. You can choose between the following:
TopView: Top view of the point cloud.
PinholeView: Pinhole camera view of the point cloud, defined by its intrinsic and extrinsic parameters.
For example, to define a top view, you can do the following:
viewpoint = view.TopView()
The pinhole view can be defined either by providing the intrinsic and extrinsic parameters:
viewpoint = view.PinholeView(intrinsic=K, rotation=R, translation=T)
K is a 3x3 intrinsic matrix, R is a 3x3 rotation matrix and T is a 3x1 translation vector.
or by using the interactive mode:
viewpoint = view.PinholeView(interactive=True)
3. Create an instance of the SamLidar class and specify the path to the checkpoint file ckpt_path when instantiating the class:
model = samlidar.SamLidar(ckpt_path="sam_vit_h_4b8939.pth")
4. Read the point cloud data from a .las/.laz file using the read method of the SamLidar instance. Provide the path to the point cloud file pointcloud.las as an argument:
points = model.read("pointcloud.las")
5. Apply the Cloth Simulation Filter (CSF) algorithm for ground filtering using the csf method of the SamLidar instance. This method returns the filtered point cloud cloud, the non-ground non_ground and the ground ground indices:
cloud, non_ground, ground = model.csf(points, class_threshold=0.1)
6. Perform segmentation using the segment method of the SamLidar instance. This method requires the filtered point cloud cloud as input, and you can optionally provide an image path image_path and labels path labels_path to save the segmentation results as an image and labels, respectively. The segment method returns the segmentation labels labels:
labels, *_ = model.segment(points=cloud, view=viewpoint, image_path="raster.tif", labels_path="labeled.tif")
Save results to .las/.laz file using the write method of the SamLidar instance:
model.write(points=points, non_ground=non_ground, ground=ground, segment_ids=labels, save_path="segmented.las")
Now, the entire code should look like this:
from segment_lidar import samlidar, view
# Define viewpoint
viewpoint = view.TopView()
# Create SamLidar instance
model = samlidar.SamLidar(ckpt_path="sam_vit_h_4b8939.pth")
# Load point cloud
points = model.read("pointcloud.las")
# Apply CSF
cloud, non_ground, ground = model.csf(points)
# Segment the point cloud
labels, *_ = instance.segment(points=cloud, view=viewpoint, image_path="raster.tif", labels_path="labeled.tif")
# Save results
model.write(points=points, non_ground=non_ground, ground=ground, segment_ids=labels, save_path="segmented.las")
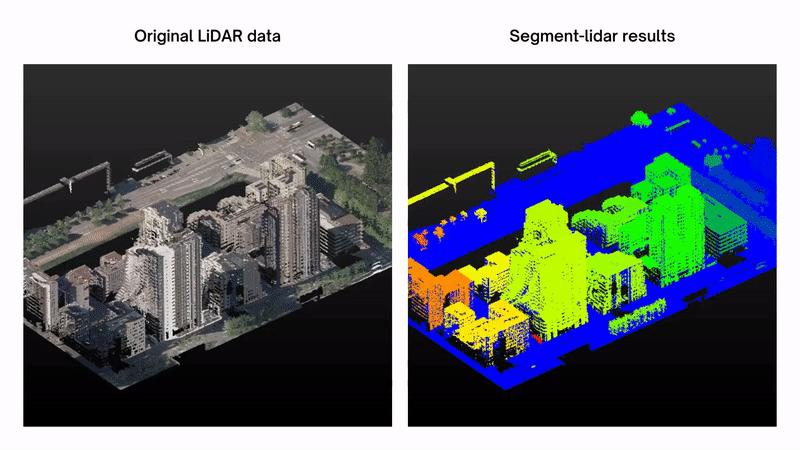
8. The resulted point cloud contains a new scalar field called segment_id. For visualization and further processing, we recommand using CloudCompare.
The following figure shows the results of the segmentation on the sample data form AHN-4:
Interactive mode
The interactive mode allows you to interactively define the viewpoint using GUI.
viewpoint = view.PinholeView(interactive=True)
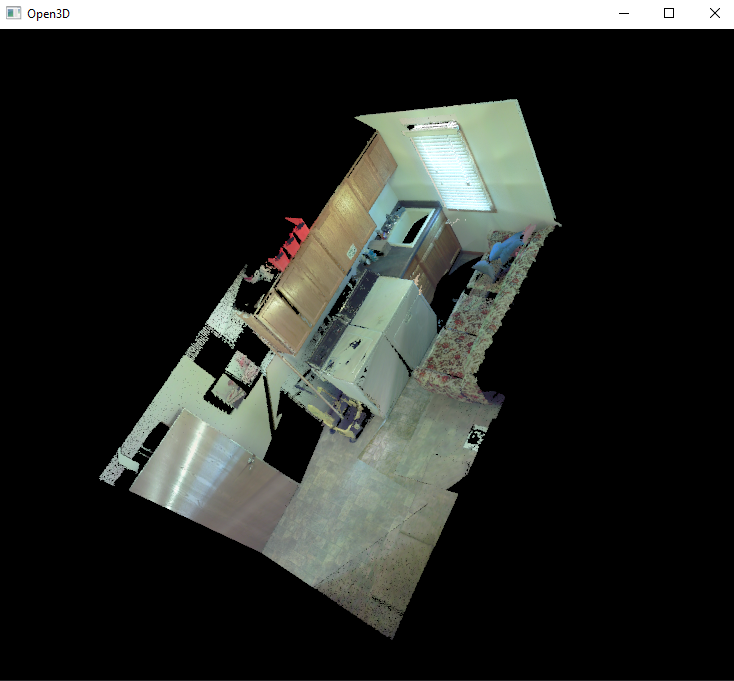
You can rotate, move and zoom the camera using the mouse (please refer to Open3D documentation for more details).
Once you are done, press p to save the image and the camera parameters, than esc to quit the interactive mode.
Example:
import os
from segment_lidar import samlidar, view
viewpoint = view.PinholeView(interactive=True)
model = samlidar.SamLidar(ckpt_path='sam_vit_h_4b8939.pth',
device='cuda:0',
algorithm='segment-anything')
model.mask.min_mask_region_area = 200
model.mask.points_per_side = 5
model.mask.pred_iou_thresh = 0.60
model.mask.stability_score_thresh = 0.85
points = model.read('laundry.las')
os.makedirs("results/", exist_ok=True)
labels, *_ = model.segment(points=points,
view=viewpoint,
image_path="results/raster.tif",
labels_path="results/labeled.tif")
model.write(points=points, segment_ids=labels, save_path="results/segmented.las")
Configuration
The segment_lidar module provides a set of parameters that can be used to configure the segmentation process. These parameters are passed to the SamLidar class as arguments when instantiating the class. The following table shows the parameters and their default values:
Parameter |
Default value |
Description |
|---|---|---|
algorithm |
“segment-geospatial” |
Algorithm to use for segmentation. Possible values are: “segment-geospatial”, “segment-anything”. |
ckpt_path |
None |
Path to the checkpoint file. |
device |
“cuda:0” |
Device to use for inference. |
model_type |
“vit_h” |
Type of the SAM model. Possible values are: “vit_h”, “vit_l”, “vit_b”. |
resolution |
0.25 |
The resolution value of the created image raster. |
sam_kwargs |
False |
Whether to use the SAM kwargs when using “segment-geospatial” as algorithm |
Here is an example of how to configure the parameters:
model = samlidar.SamLidar(ckpt_path="sam_vit_h_4b8939.pth",
algorithm="segment-geo-spatial",
model_type="vit_h",
resolution=0.5,
sam_kwargs=True)
Additionally, the parameters of segment-anything can be configured as follows:
model.mask.crop_n_layers = 1
model.mask.crop_n_points_downscale_factor = 2
model.mask.min_mask_region_area = 500
model.mask.points_per_side = 10
model.mask.pred_iou_thresh = 0.90
model.mask.stability_score_thresh = 0.92
Please, refer to the segment-anything repository for more details about these parameters. See the complete arguments list of the SamLidar class here.